Instructions for Assembling XY Robot, Ice Box 1 and Ice Box 2¶
Brief Description¶
- The ChronoSeq device only produces high quality Droplets for a short period called the Sampling Duration. The remainder of the time is spent:
- Washing out any remaining cells or beads in the ChronoSeq device.
- Priming the Microfluidic chip.
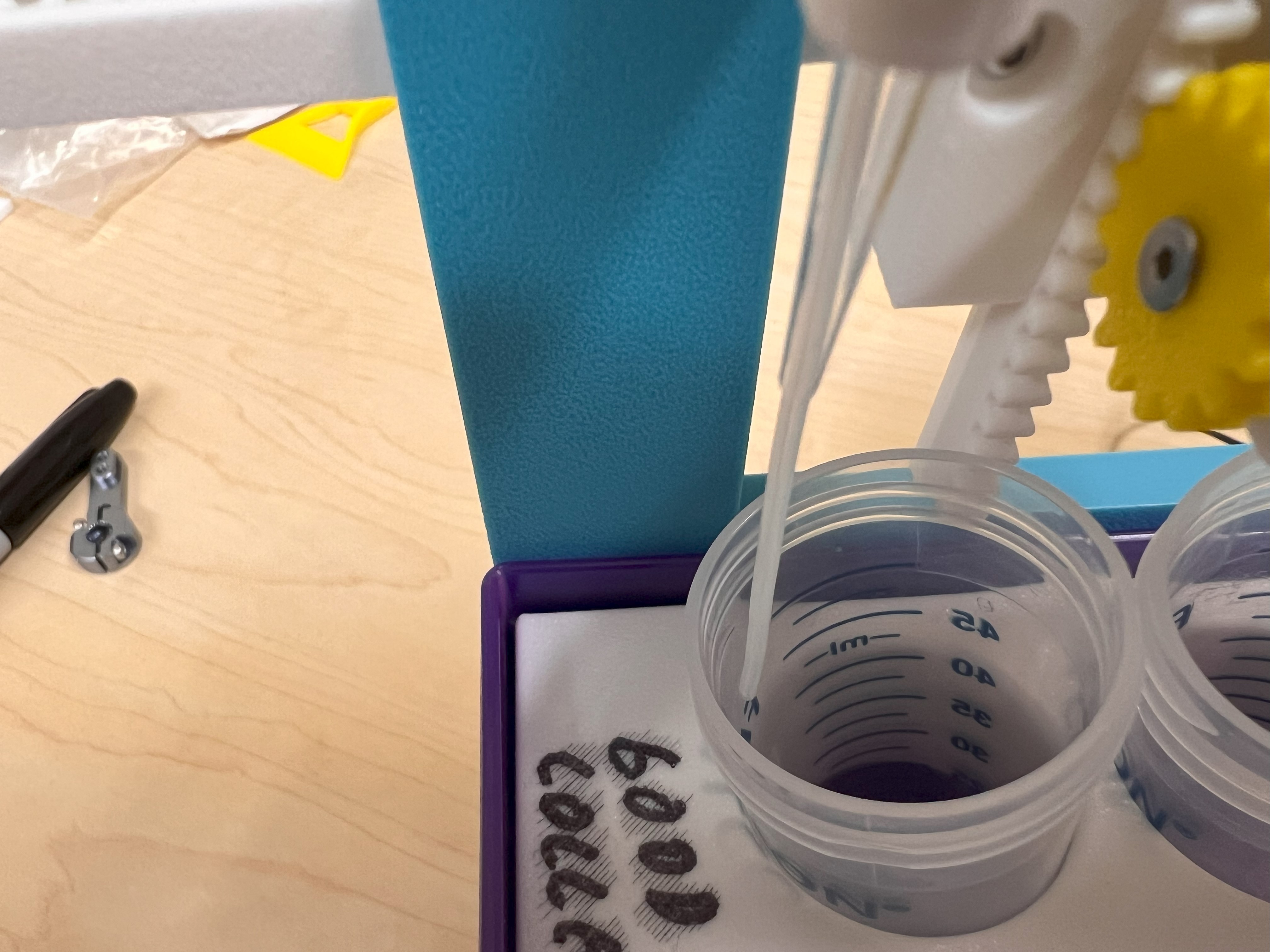
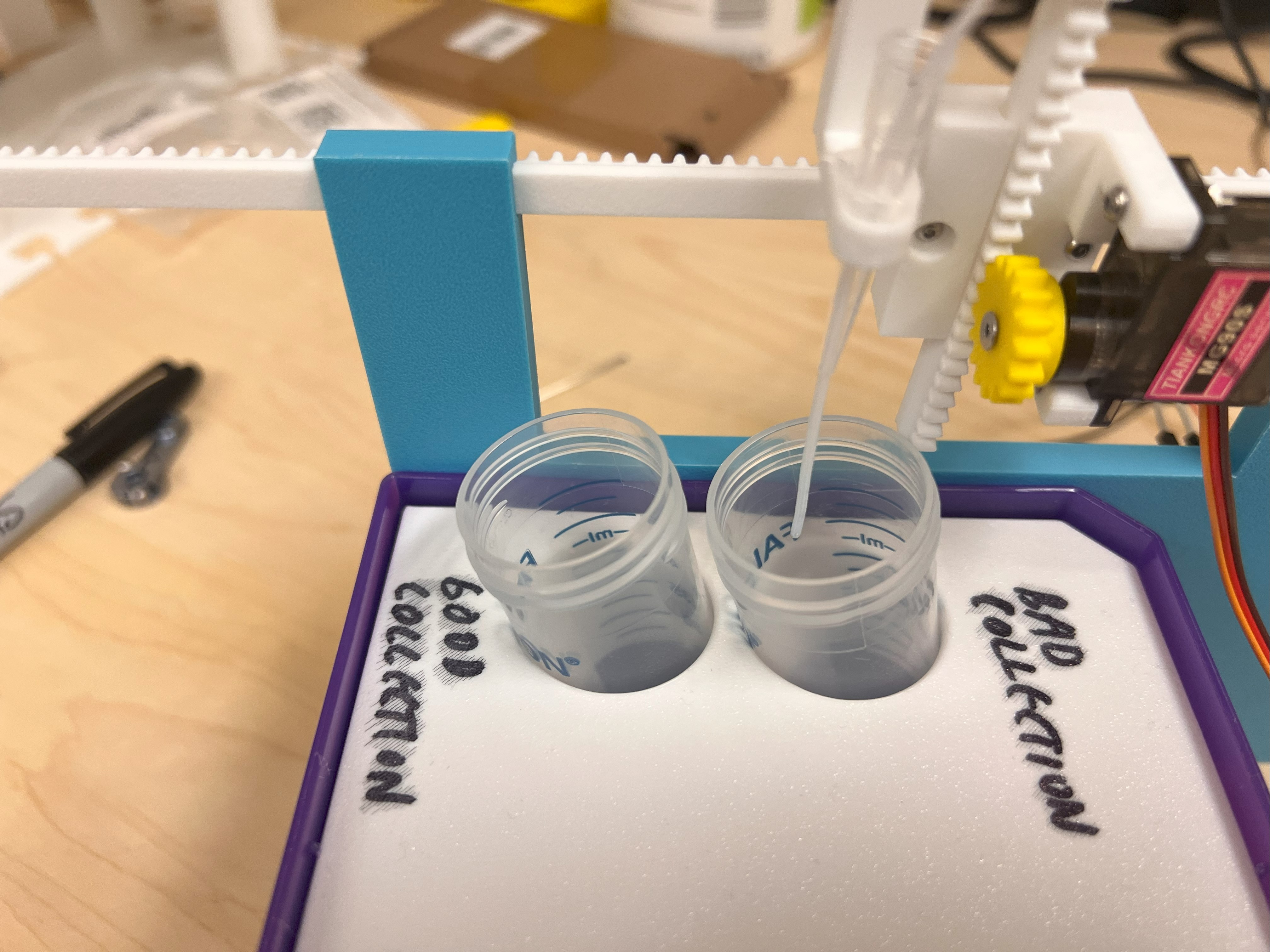
- We need a way to deposit these high quality Droplets in a separate 50ml tube during the Sampling Duration. The remaining liquid flow-through needs to be deposited into a different 50ml Tube.
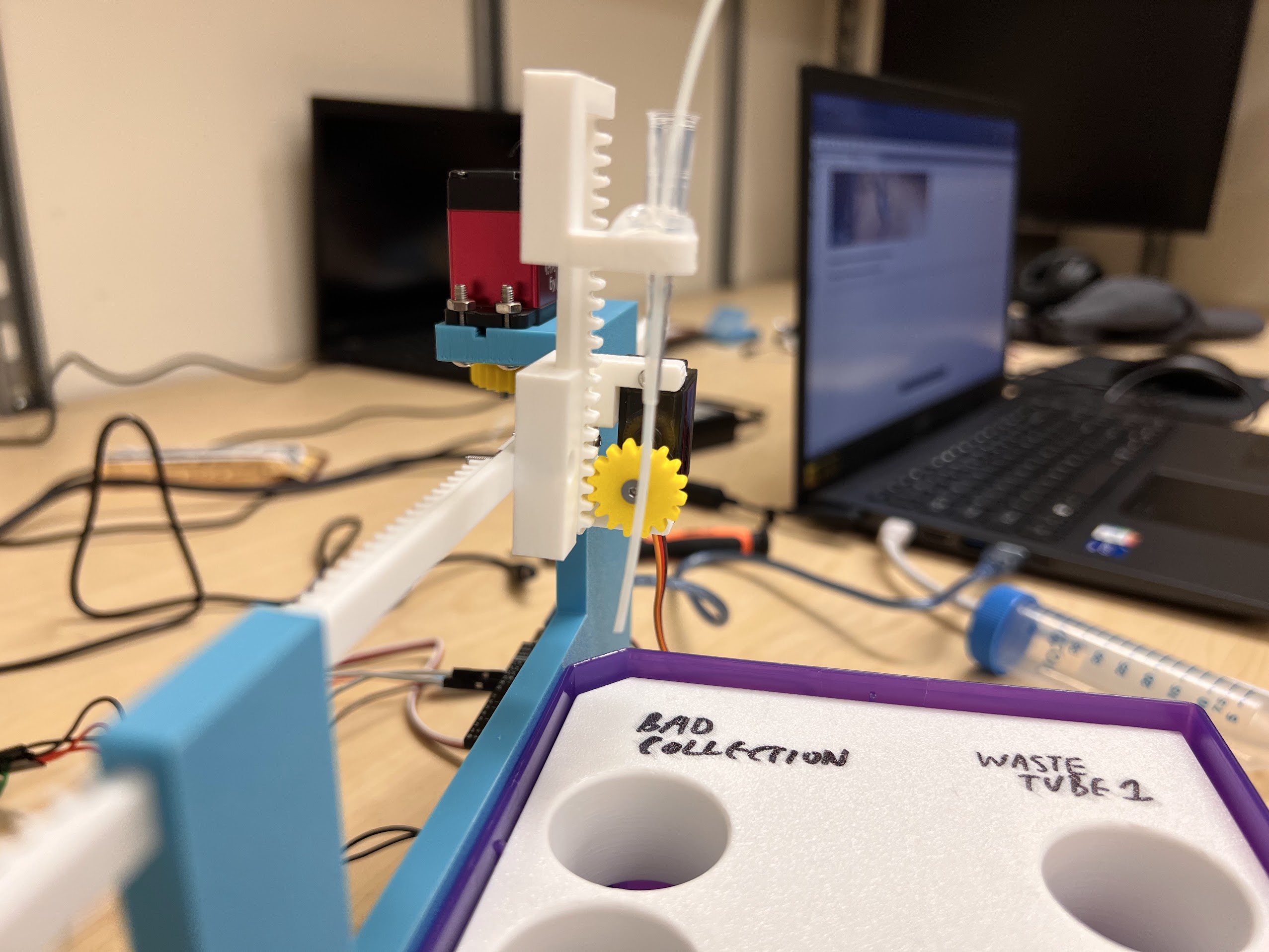
- To switch between the "Good Collection Tube" for the high quality droplets, and "Bad Collection Tube" for the remaining flow-through, we use the XY Robot.
- The XY Robot is mainly made of 3D Printed parts and two Servos.
- Both the XY Robot and XYZ Robot Deposit the liquid into tubes held in place using 3D Printed Lids.
| Location of XY Robot in Schematic indicated with Red Box | |
|---|---|
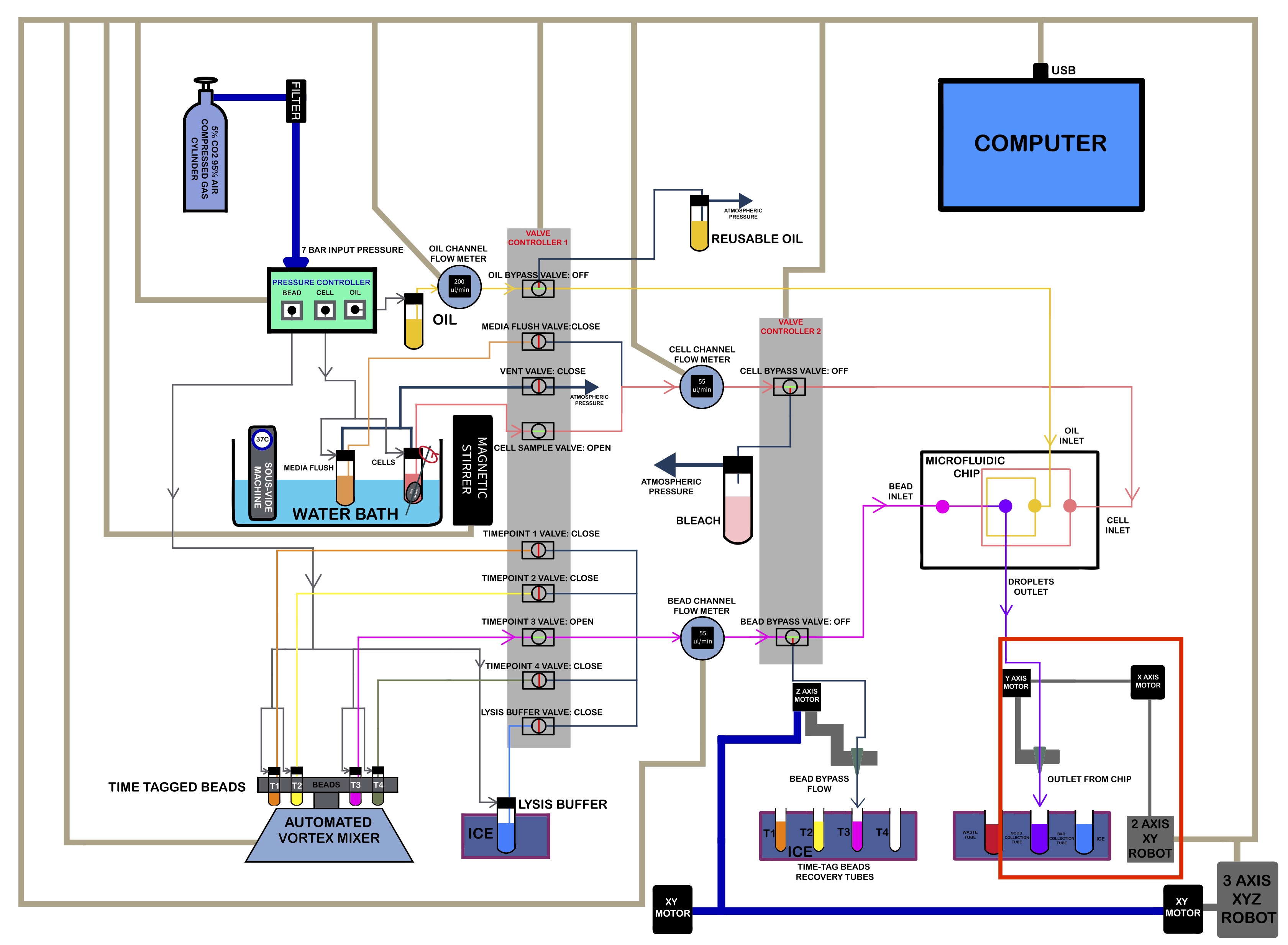 |
|
3D Printing Parts¶
- We used a Bambu Lab X1 Carbon to print the Parts.
- 0.4mm Nozzle
- Textured PEI Plate
- We generated several 3MF Files with all the Settings we used for the Print. You can open these files on the Orca Slicer.
- The Original STEP Files and F3D Files can be found in the same directory.
- We also generated the 3MF and CAD files for the Ice Box Lids.
- We recommend using White Colored PLA for printing these Lids.
- We recommend getting a 3D Printing Accessories Kit if you haven't purchased one already.
- Its extremely helpful in removing supports and cleaning up the print.
Ordering the Parts¶
- MG90S 9g Servo
- Heathrow Scientific Ice Boxes SKU:HS23271A
- 5V 20W Power Supply
- DC Power Supply Breakout Screw Terminal
- Servo Extension Cable Kit
- 20Kg Servo
- Self Tapping Screw Set
- Arduino UNO R3 Clone
- Metal Servo Horn Kit
- 6 inch/150mm Adjustable Wrench
- Dupont Jumper Cables
- Electronics Screw Driver Set
- M4 M3 M2.5 M2 Button Head Socket Cap Screws Bolts Nuts Washers Assortment Kit
Assembling the Ice Boxes¶
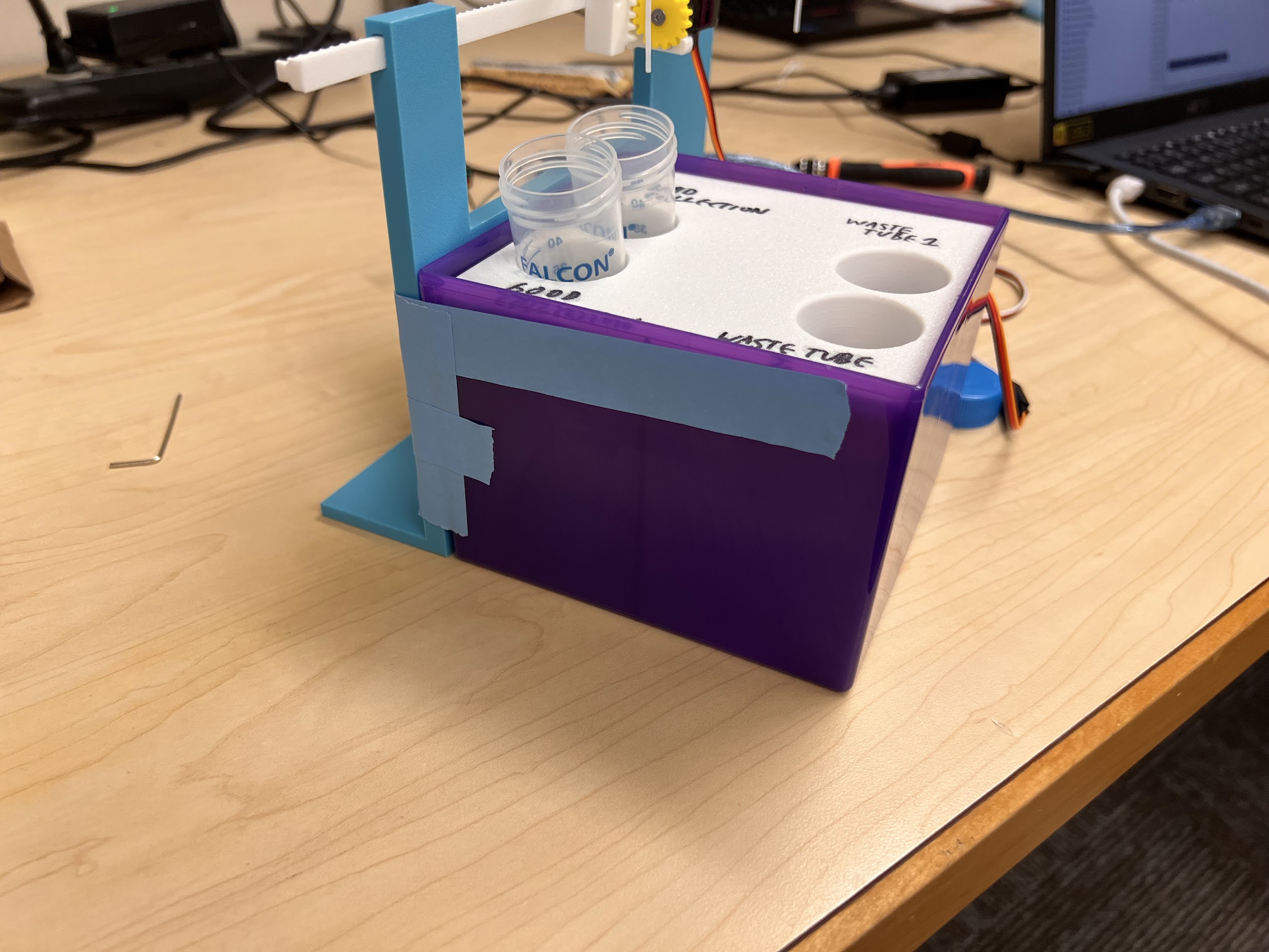
- Simply replace the Heathrow Scientific lids with the 3D Printed Lids.
- The printed lids will just pop in place.
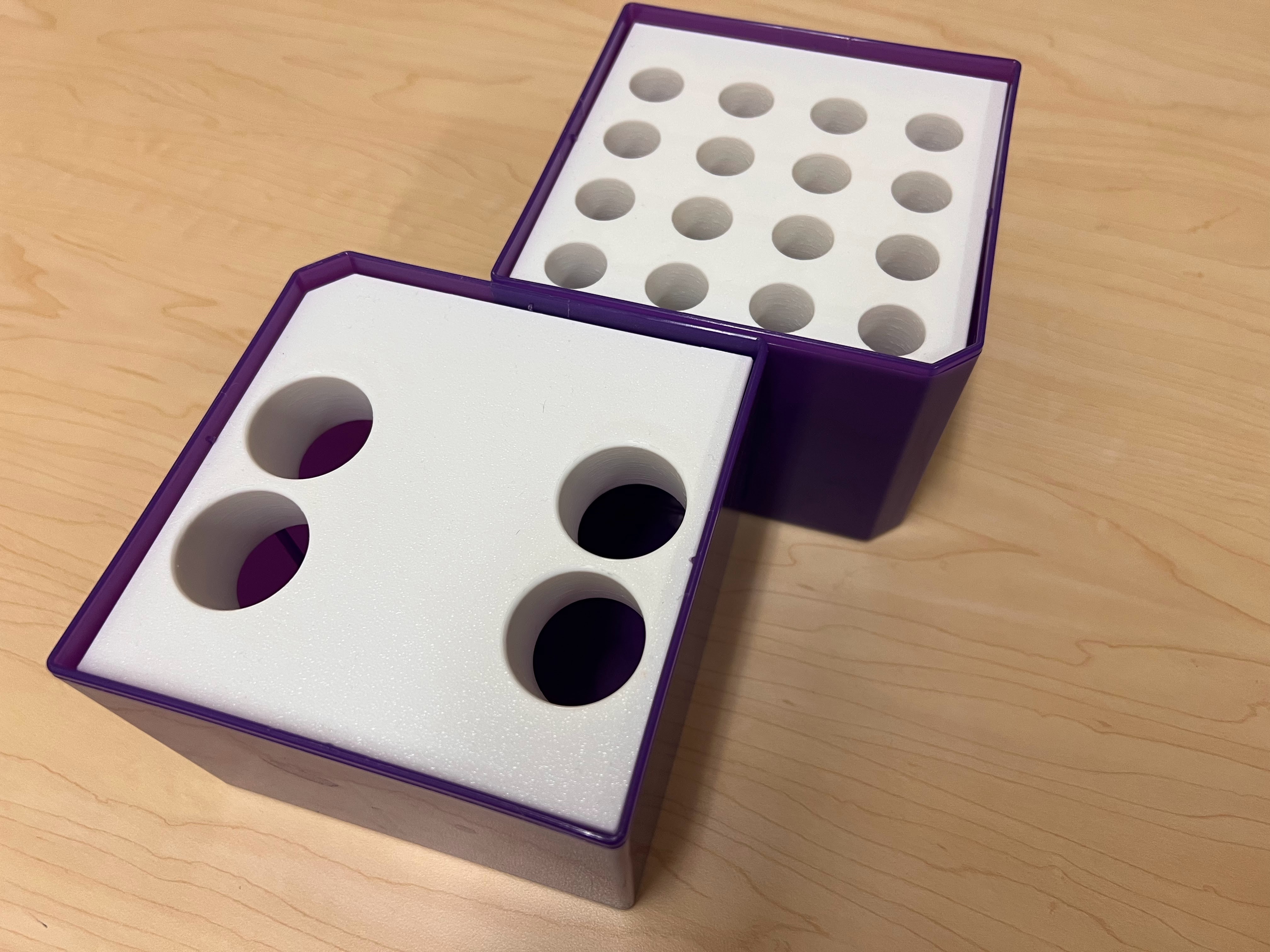
- The printed lids will just pop in place.
- Label the 50ml and 15ml Lid Ice Boxes.
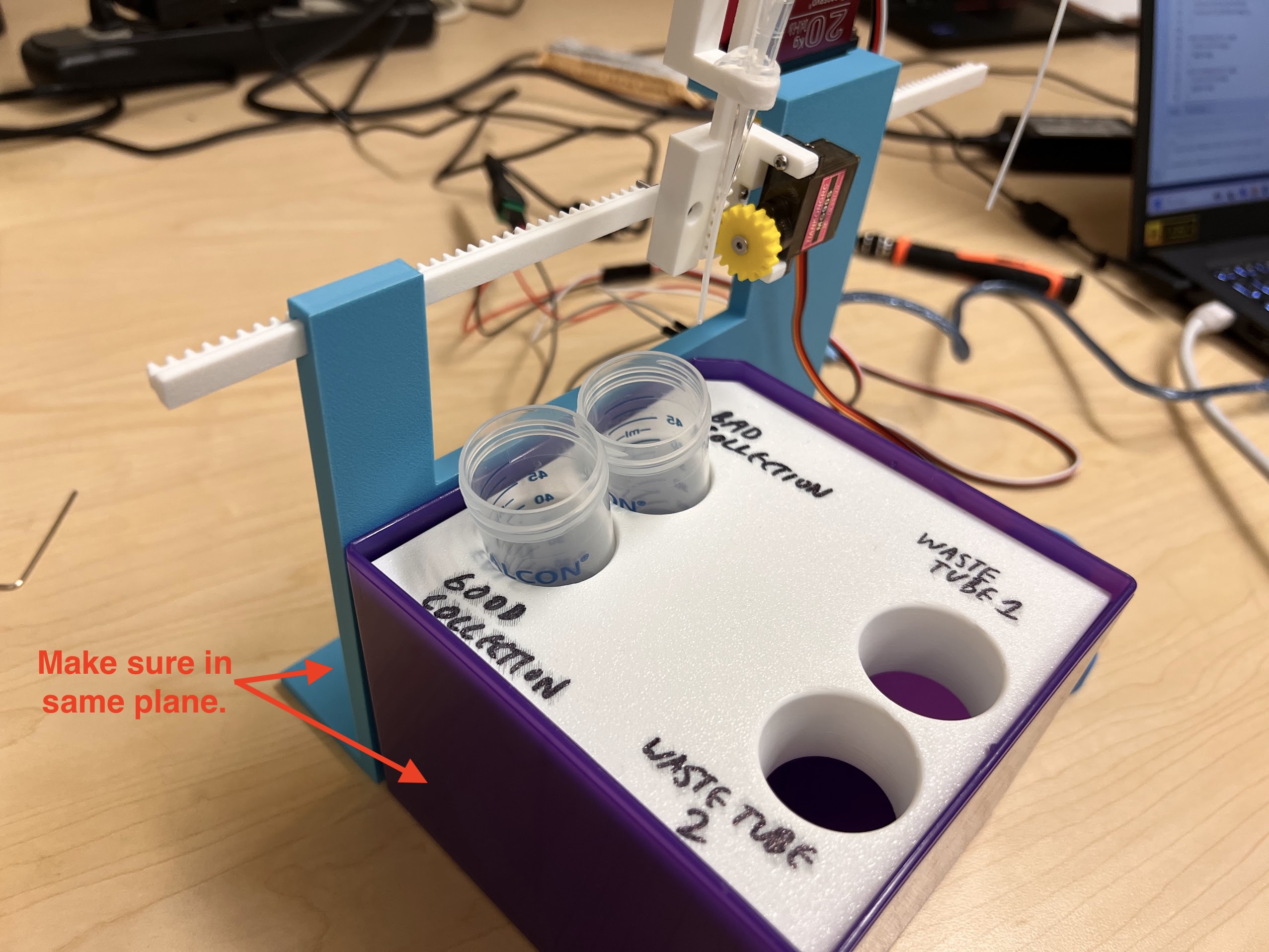
- Make sure the orientation matches the picture below.
- The 50ml Tube Positions are:
- Top Left: Bad Collection Tube
- Bottom Left: Good Collection Tube
- Top Right: Waste Tube 1
- Bottom Right: Waste Tube 2
- The 15ml Tube Positions are marked in increasing order with the first position being the bottom right and last positions being the top left.
- Mark the positions on the Lid with a Permanent Marker as follows.

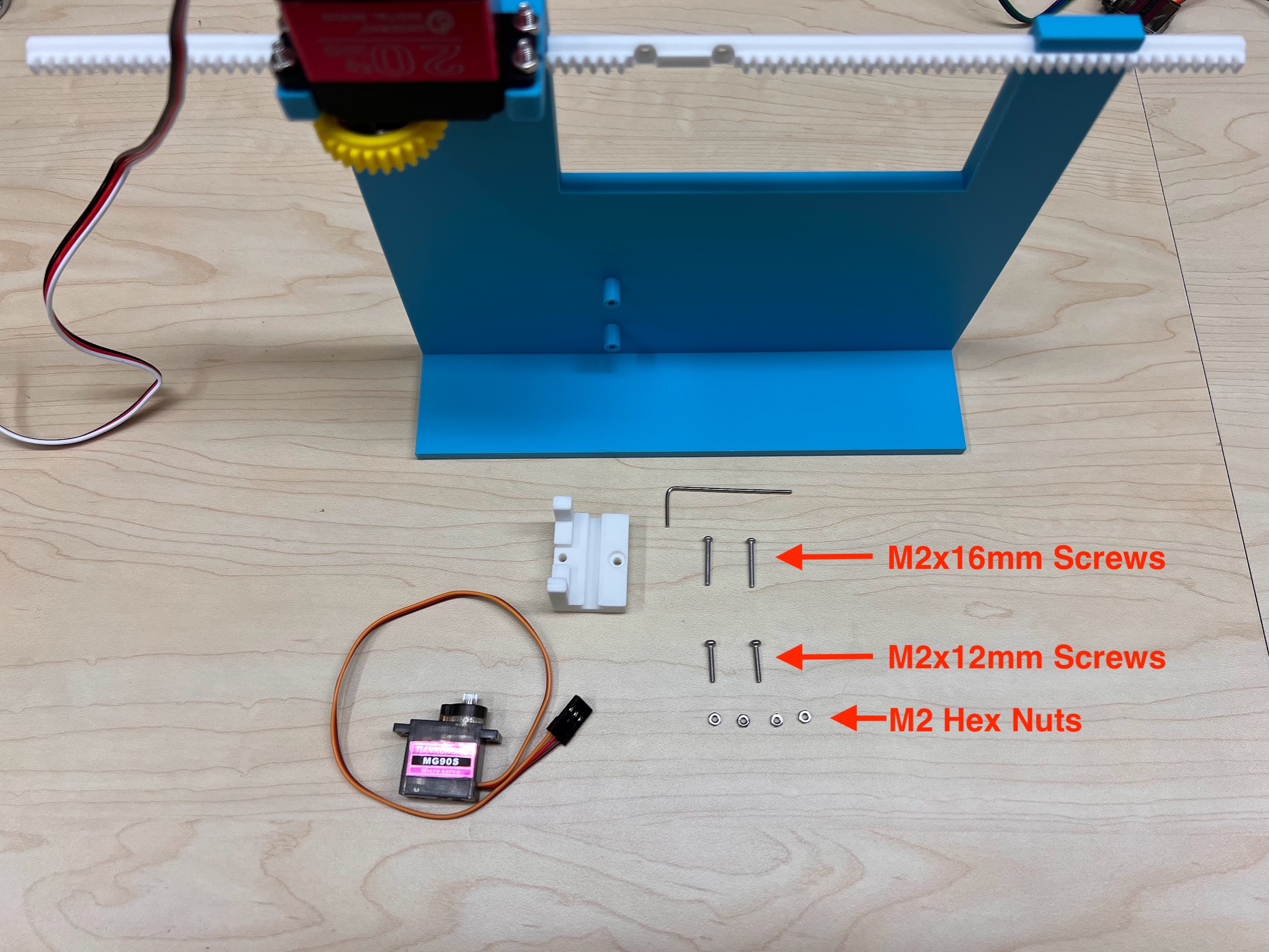
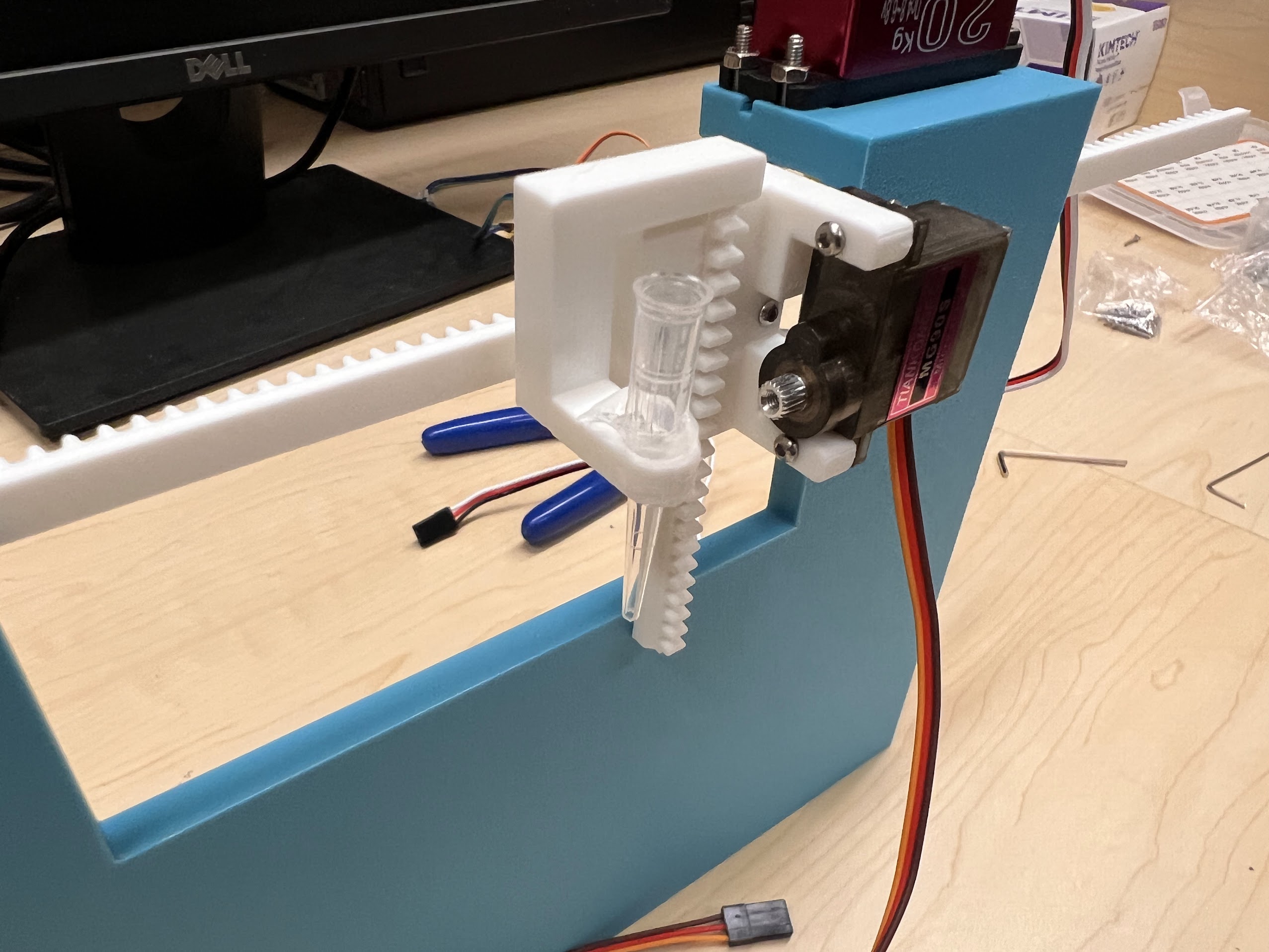
Assembling the XY Robot¶
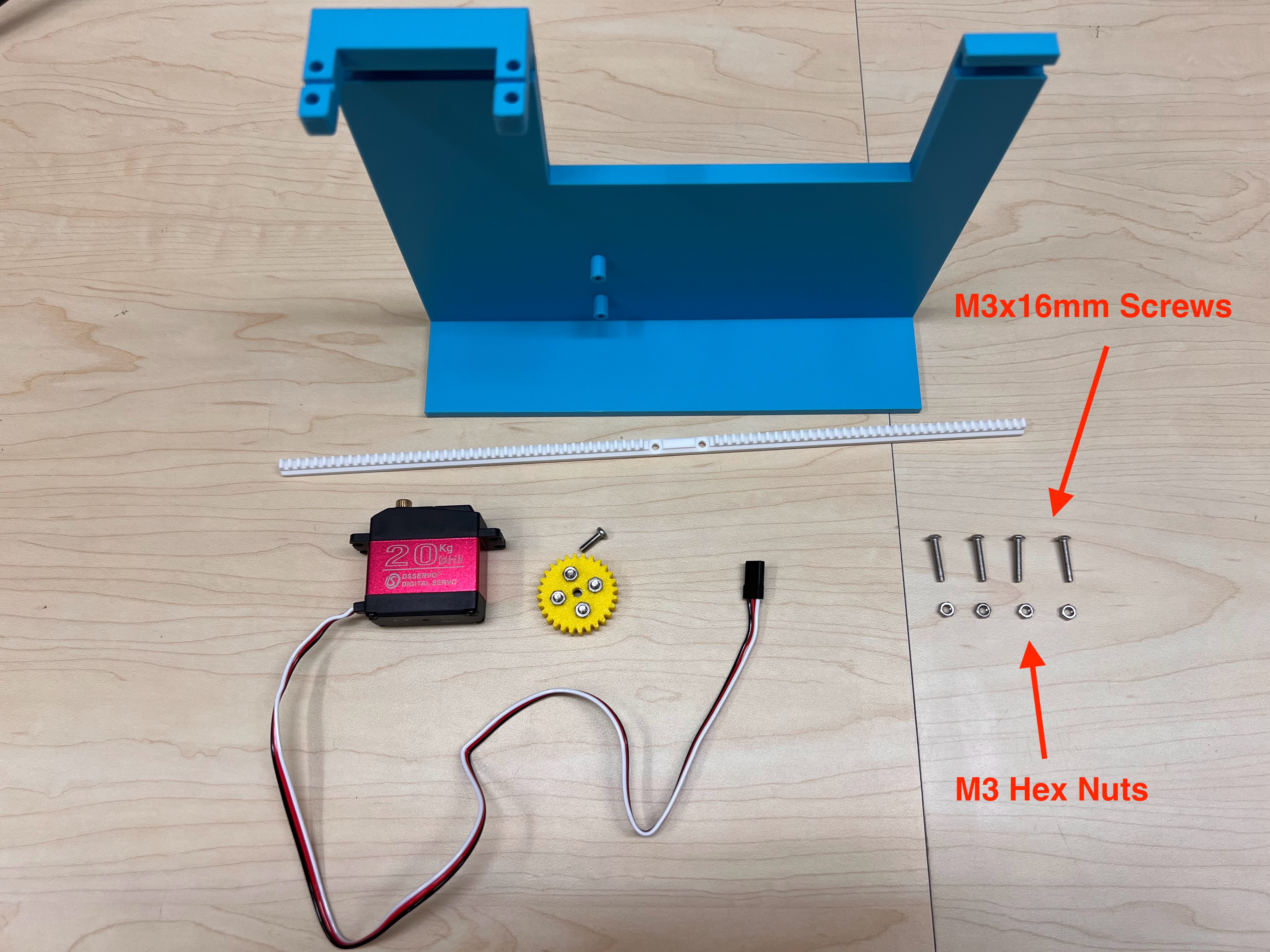
Assembling the Large Gear¶
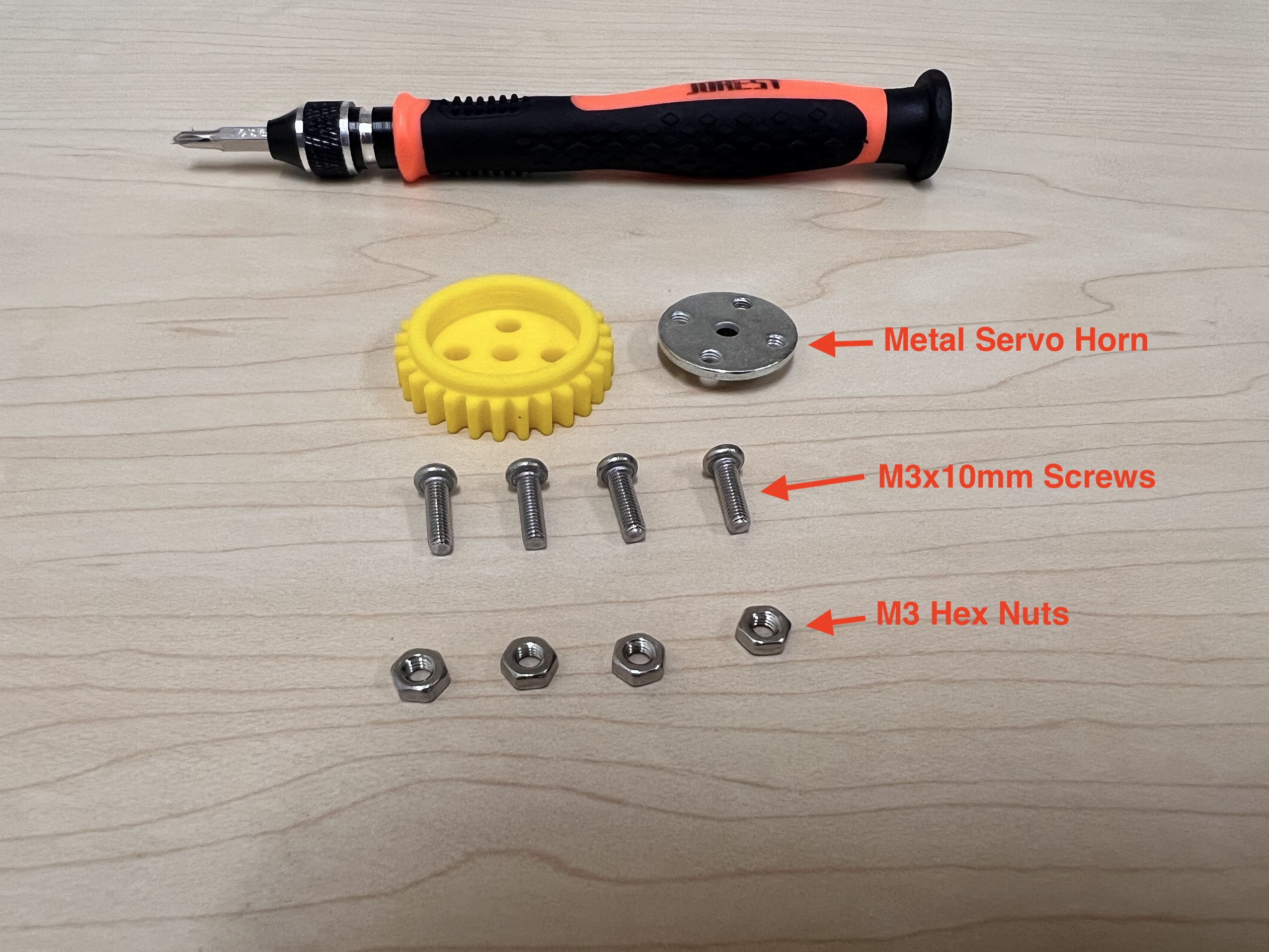
- We will first assemble the Large 3D printed gear. You will need the following parts from the Metal Servo Horn Kit.
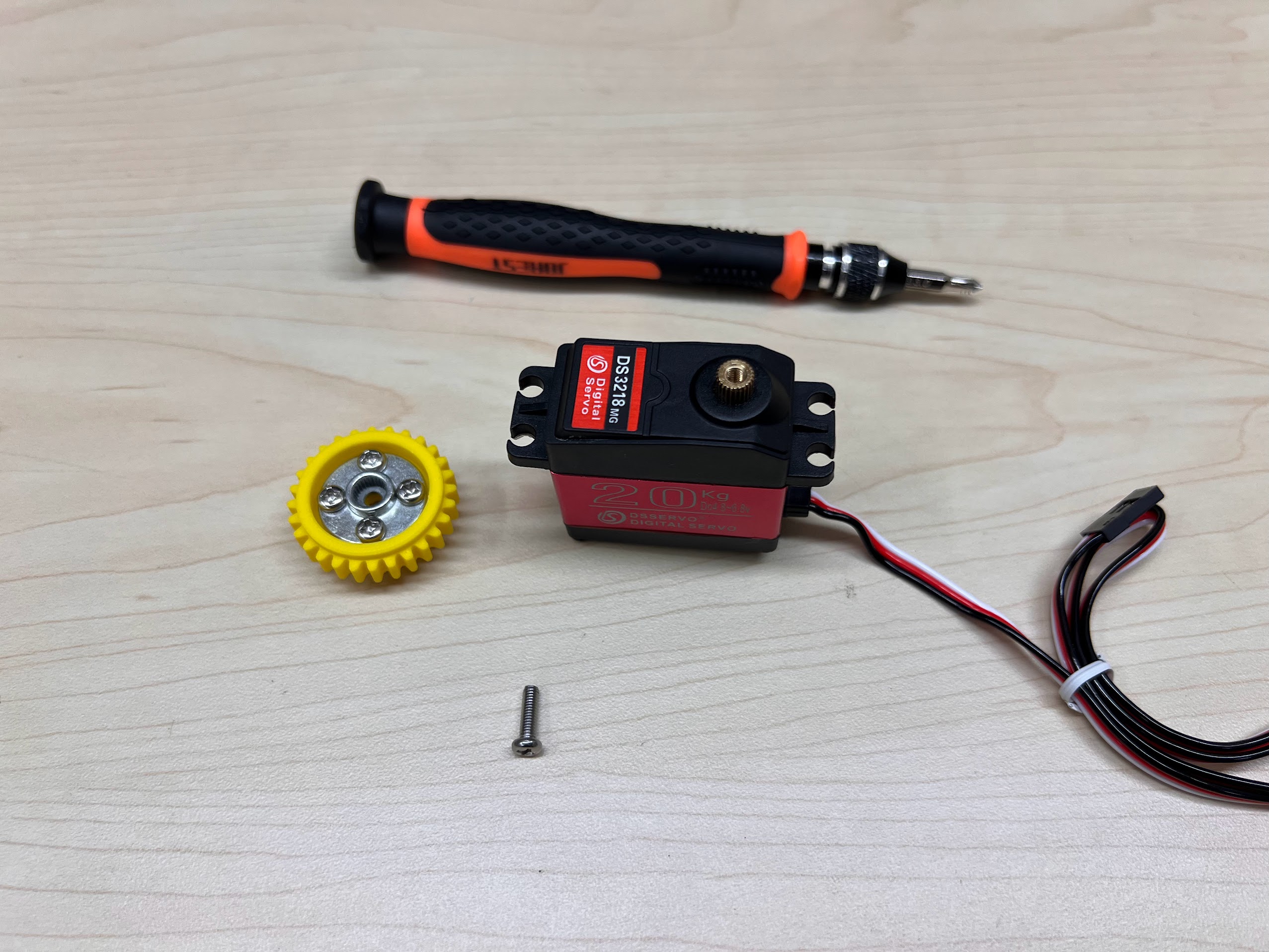
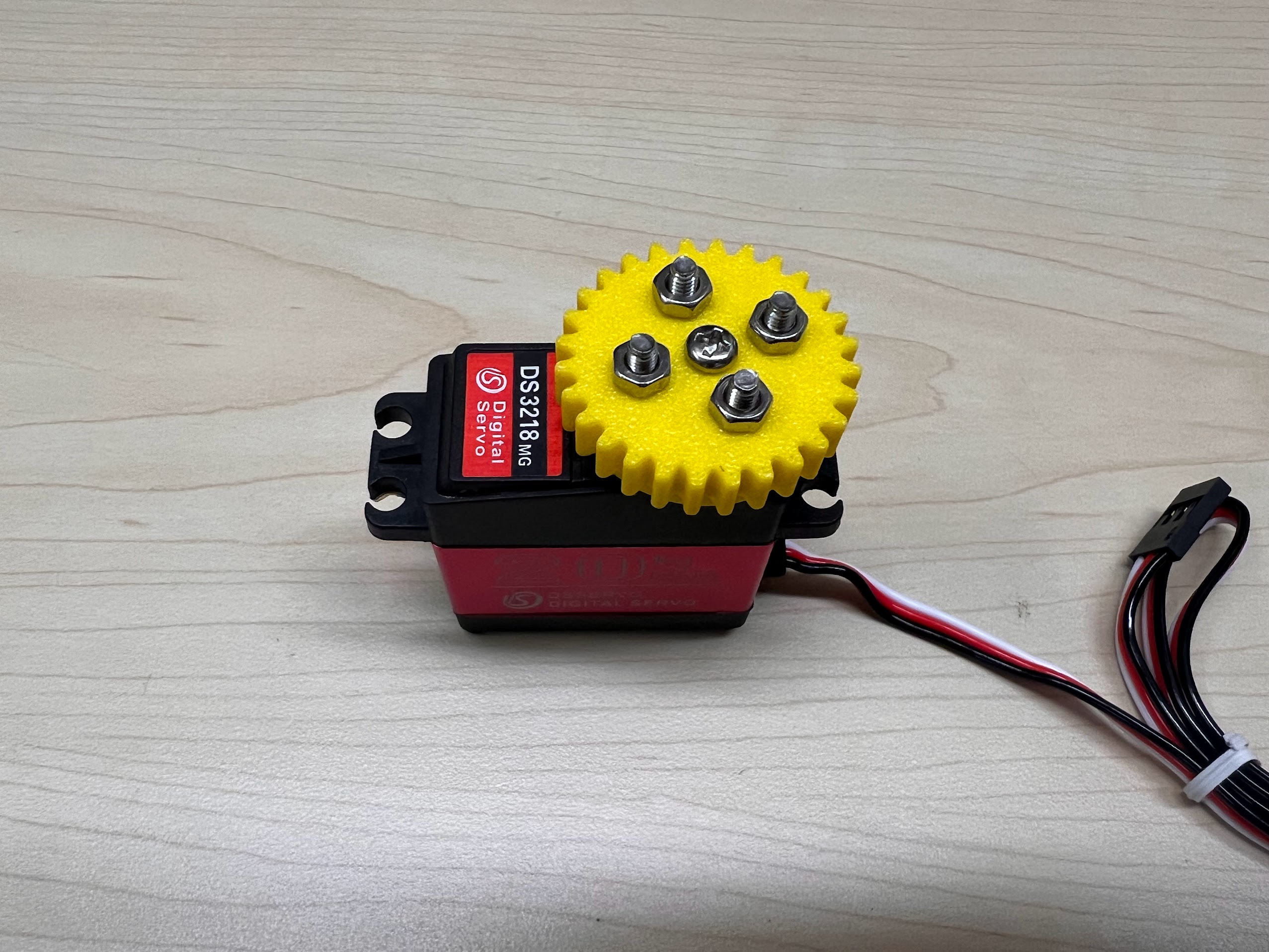
- Assemble as follows and then tighten the nuts using the Adjustable Wrench.

- Using another M3x10mm Screw attach the Assembled Large Gear to the 20Kg Servo.
 |
 |
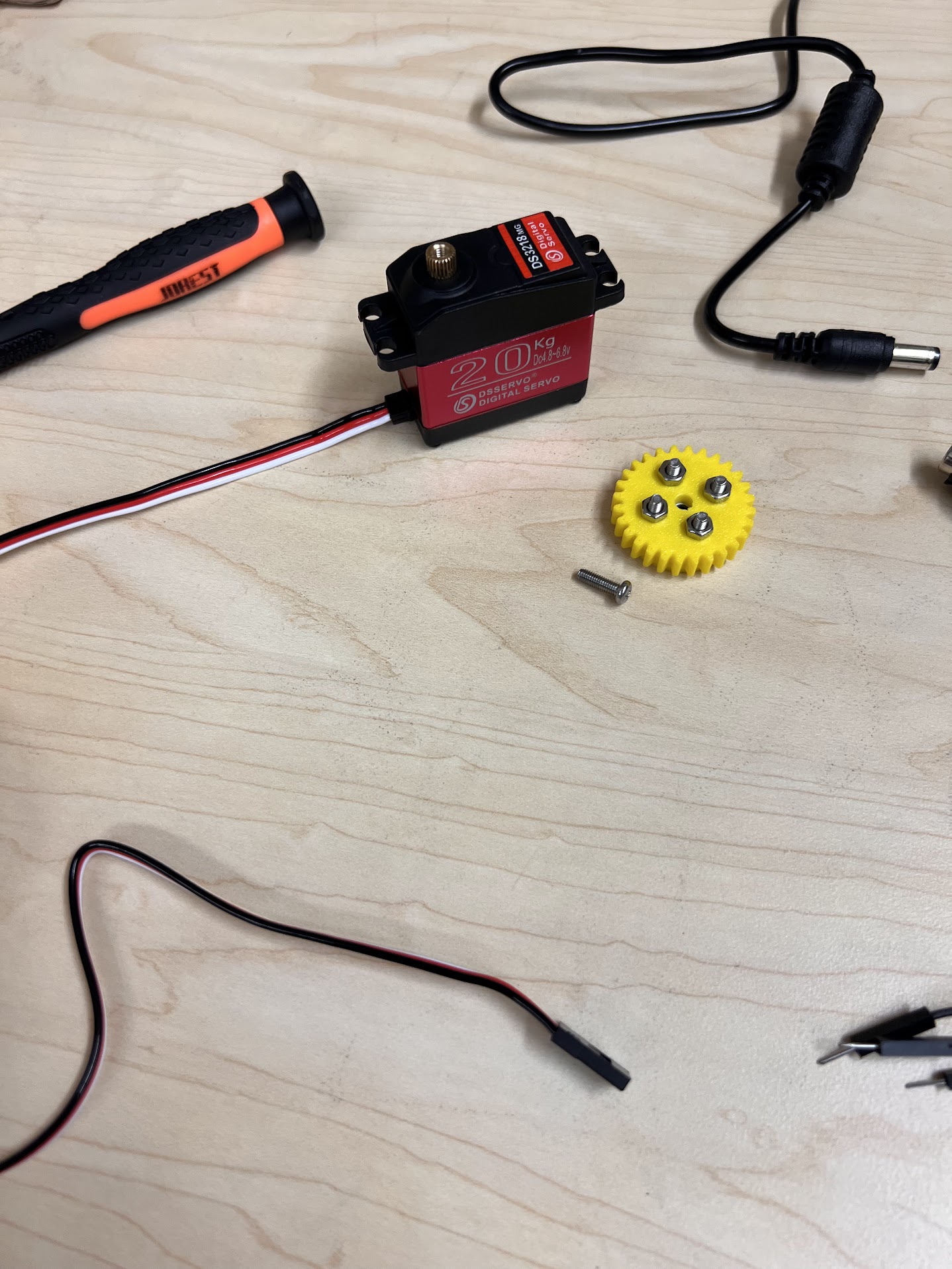
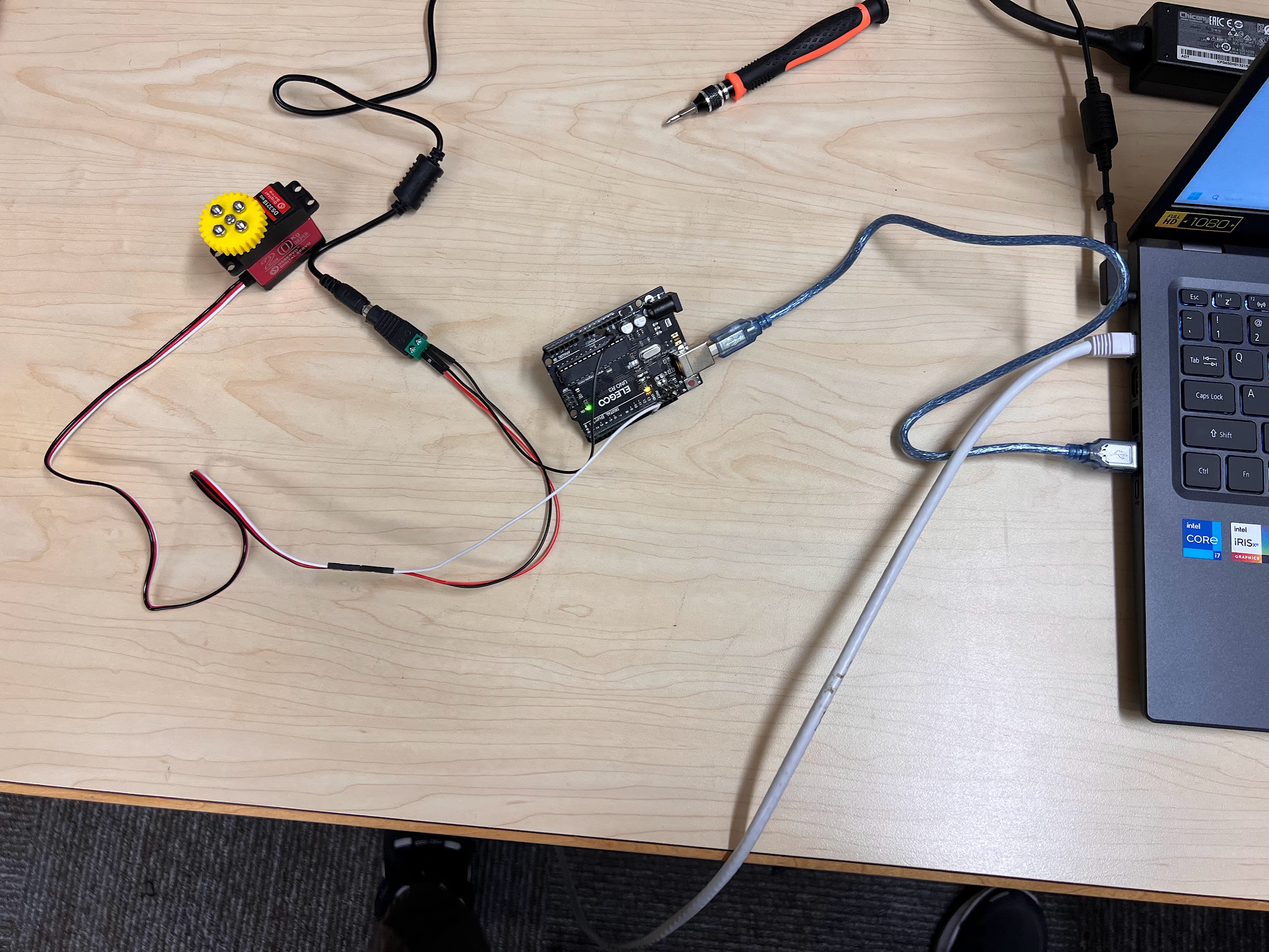
Testing the 20Kg Servo¶
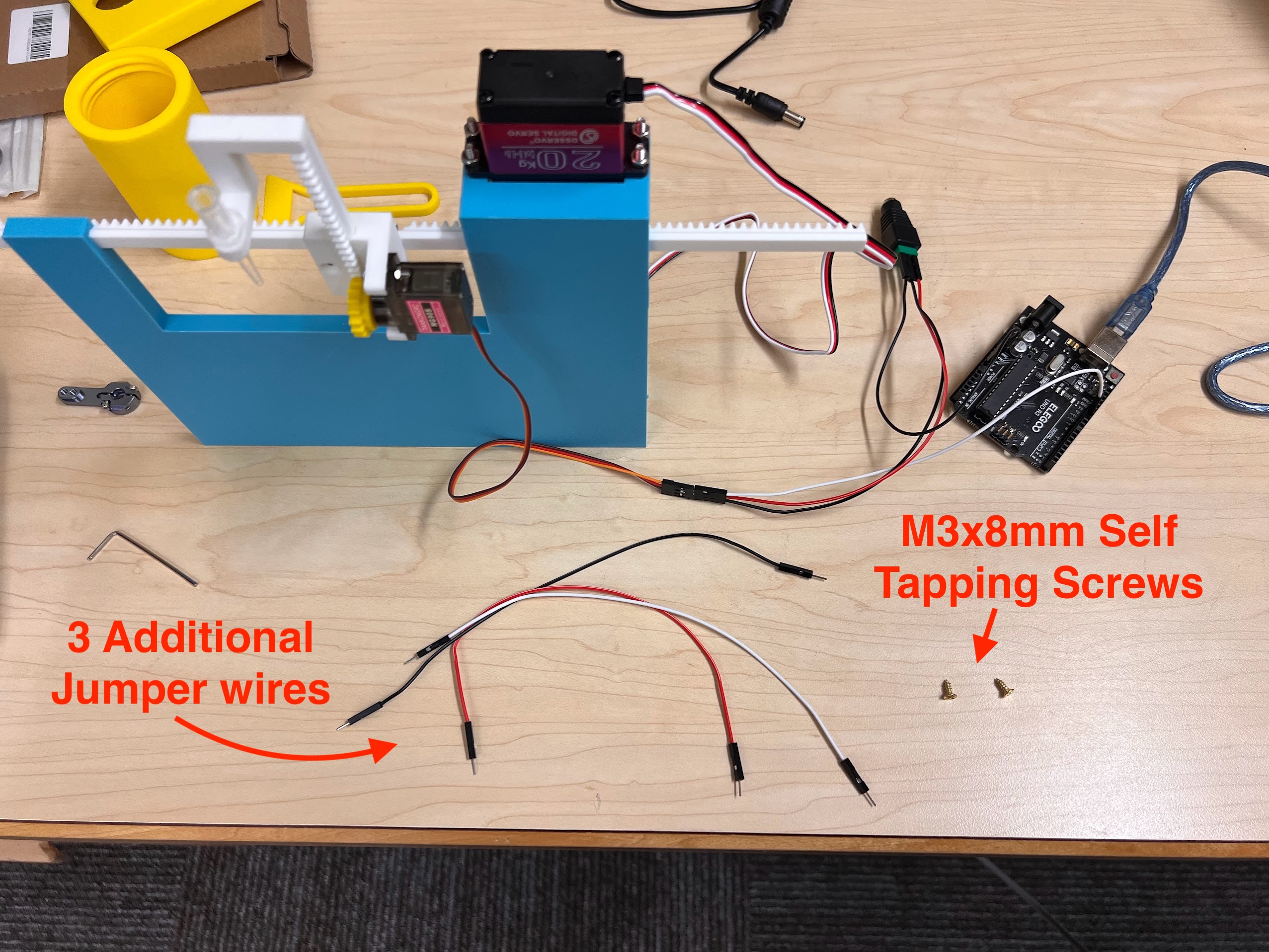
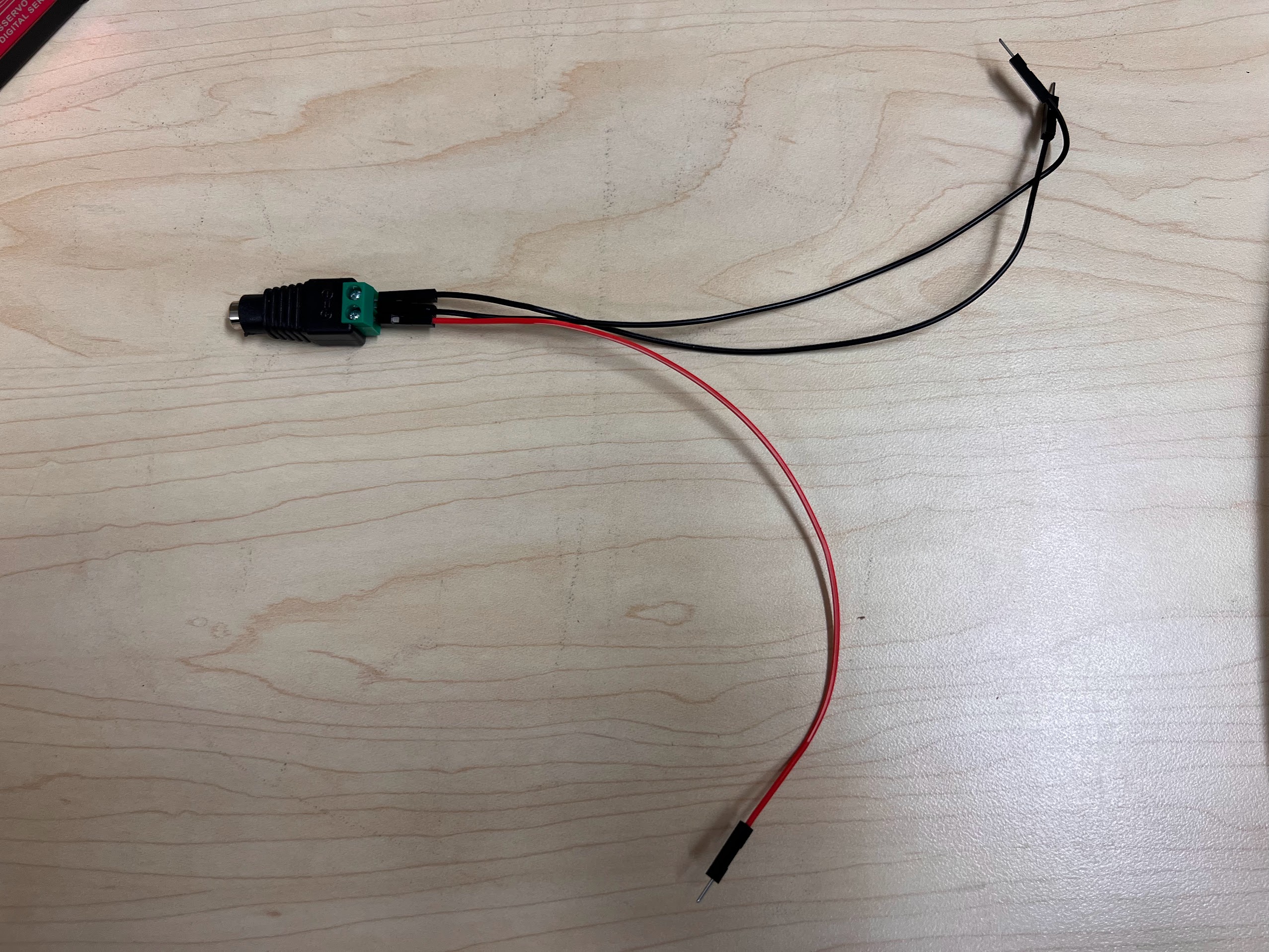
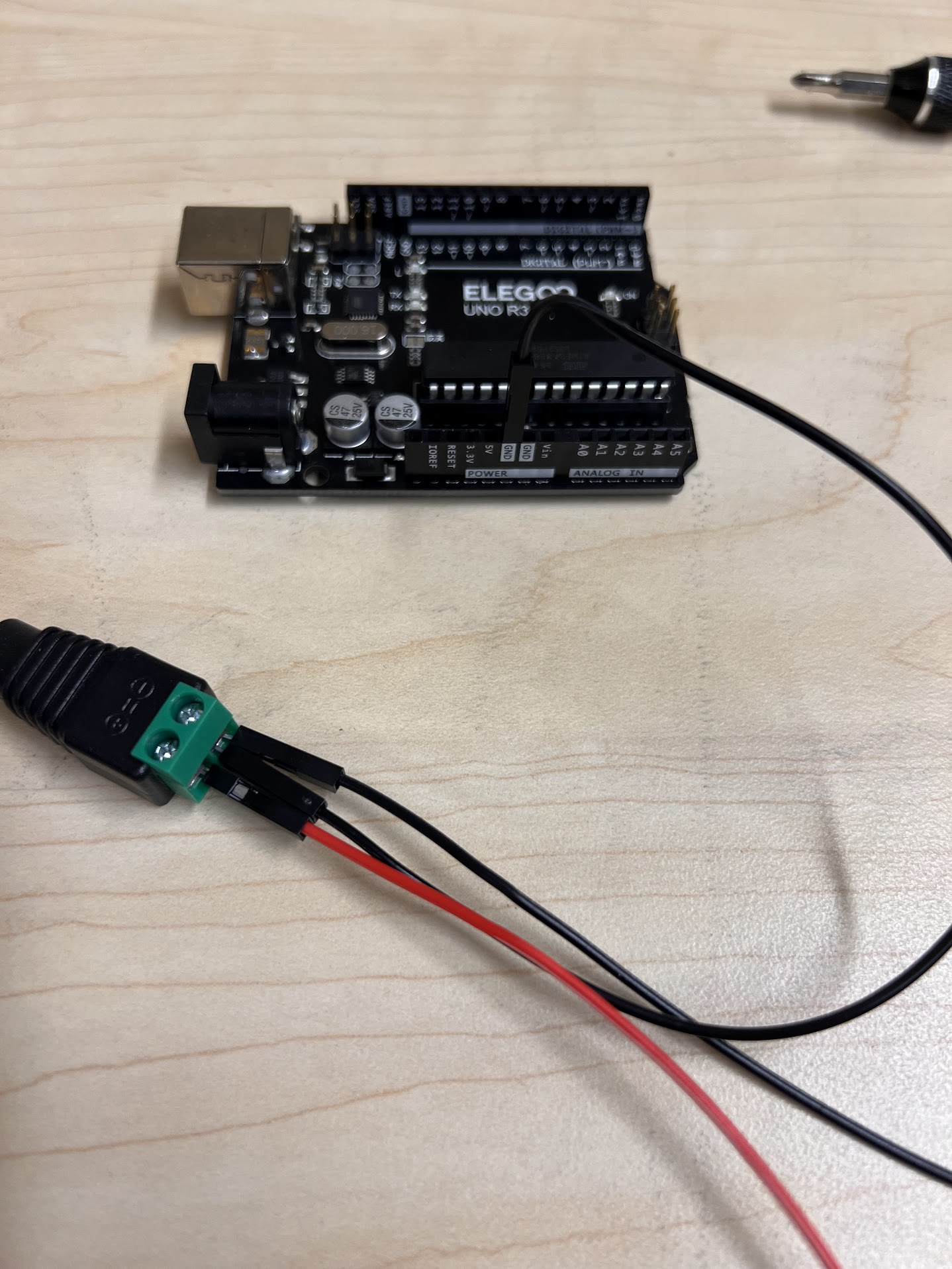
- We will now connect our Servo to our UNO R3 Board and computer to test it. You will need the following components:
- Female DC Barrel Breakout Screw Terminal
- Male to Male: Red, White and Two Black Jumper Wires
- Arduino UNO R3 Board and USB Cable
- Servo with the Assembled Horn
- 20W 5V Power Supply
- Phillips Head Screw Driver.

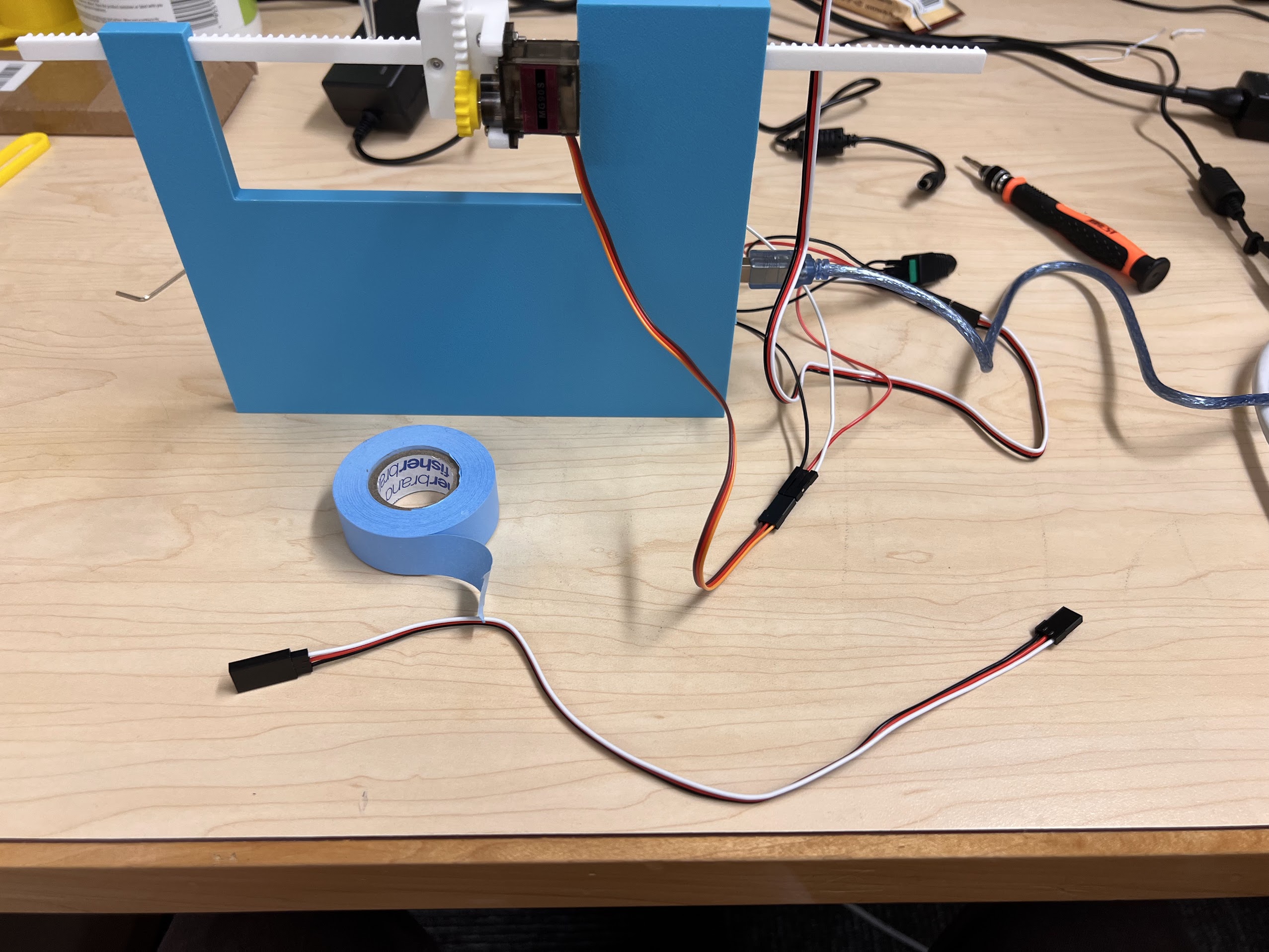
- Attach the Red Jumper Wire to the +VE Screw Terminal and the Two Black Jumper Wires to the -VE Screw Terminal of the DC Barrel Connector.
- Attach the free end of one of the Black Jumper Wires to the GND Terminal on the UNO R3 Board.
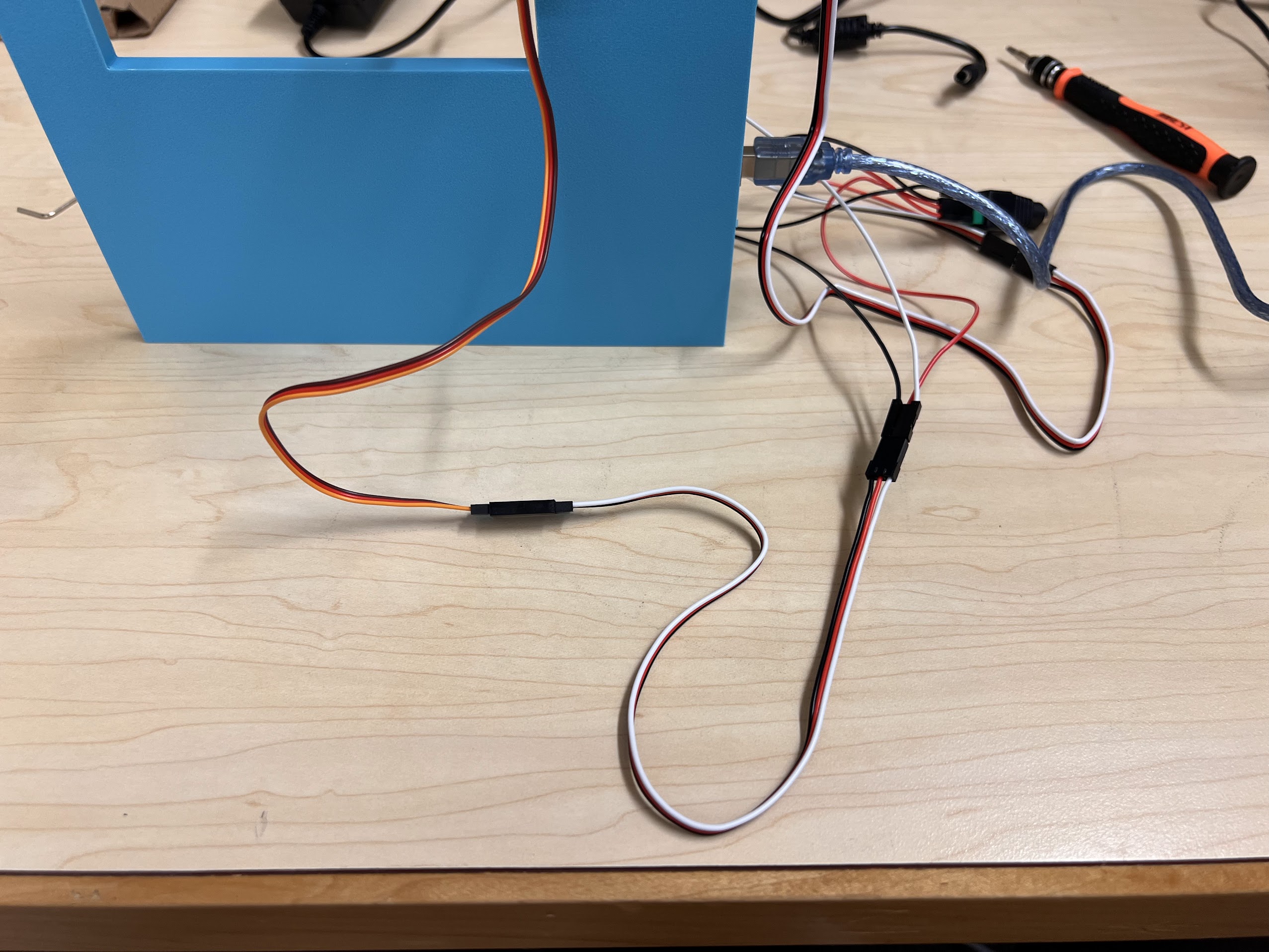
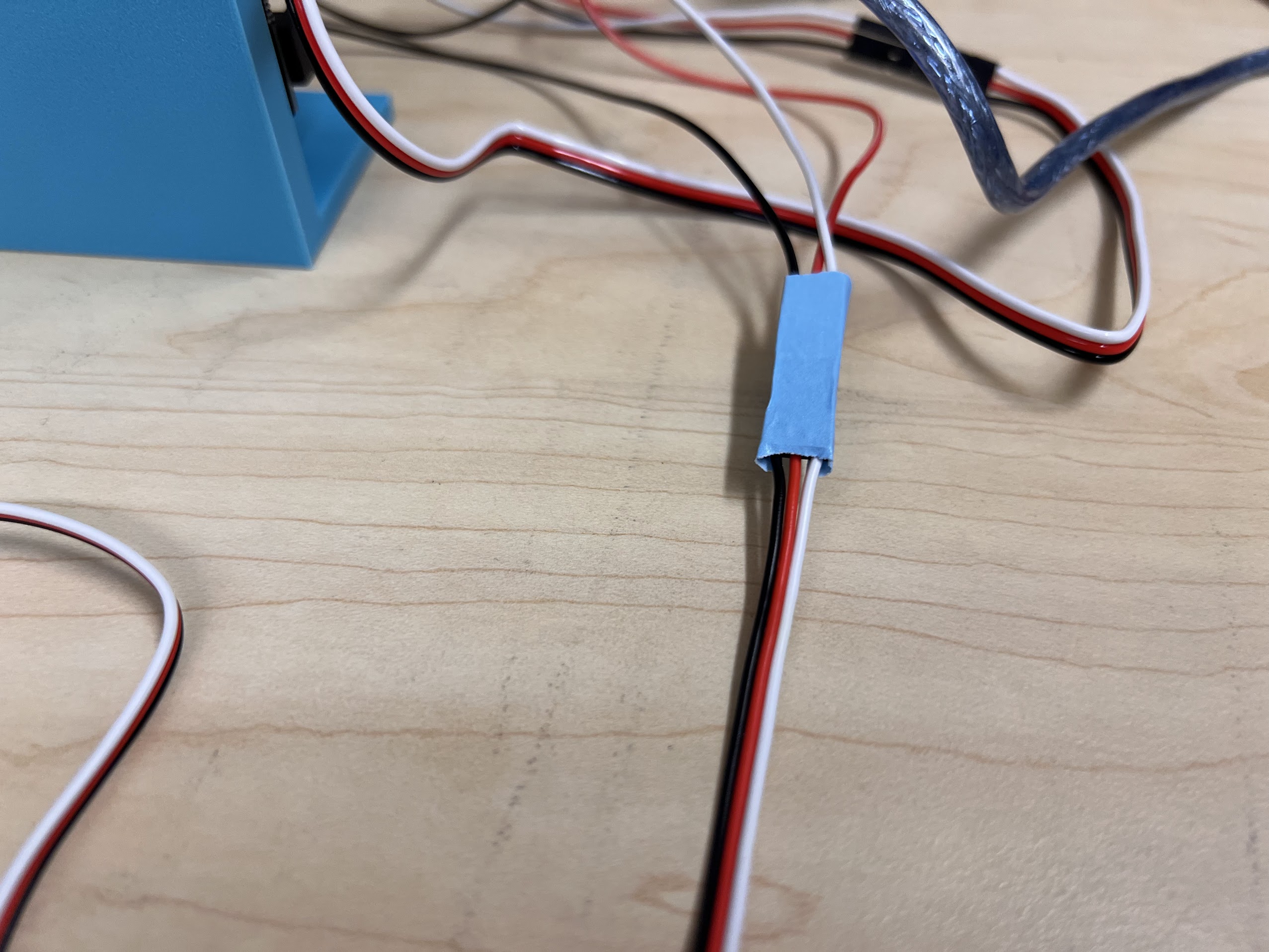
- Attach the other Black Jumer Wire to the Black Wire Female Terminal for the Servo.
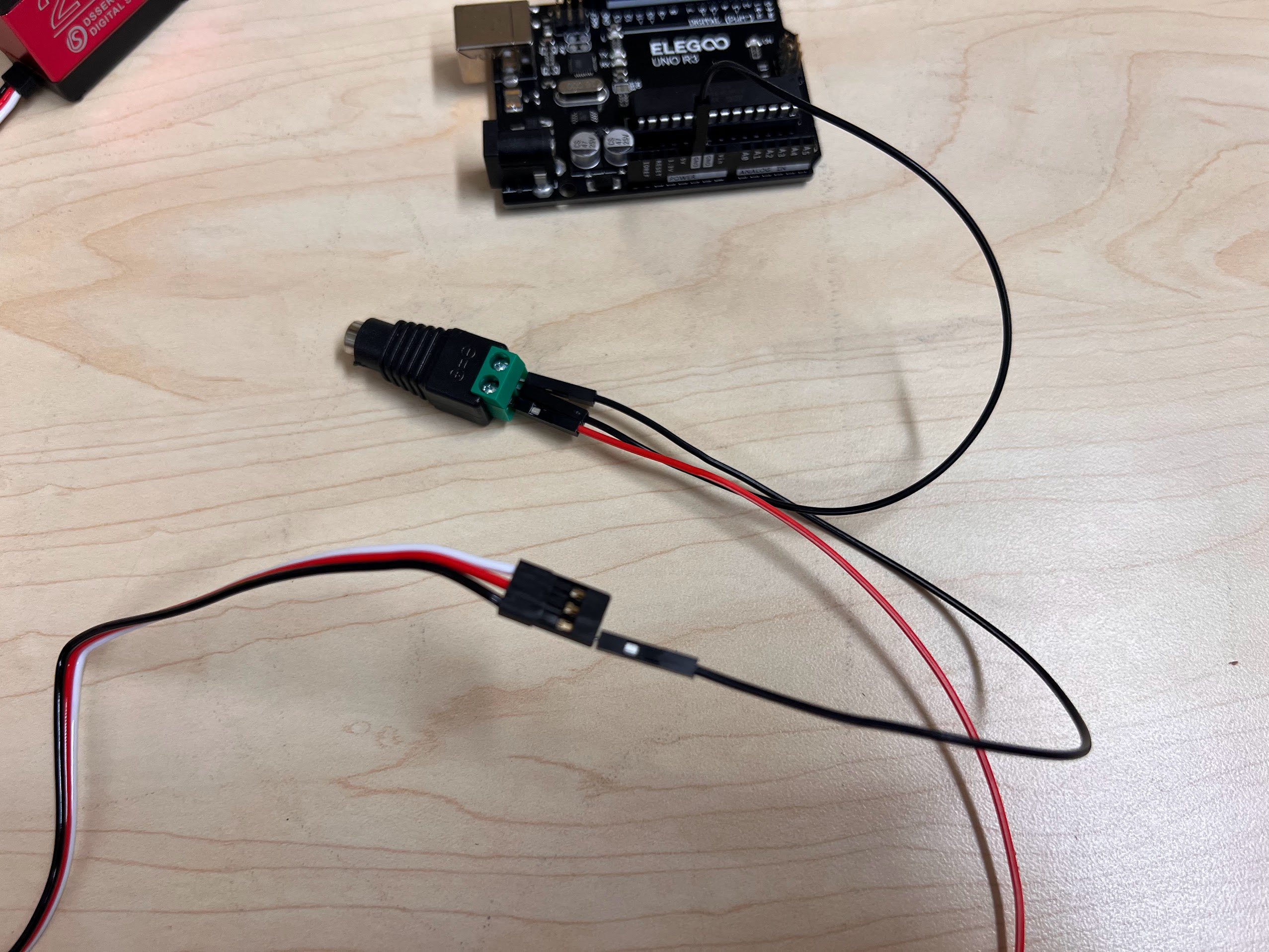
- Attach the Red Jumper Wire to the Red Wire Female Terminal for the Servo.
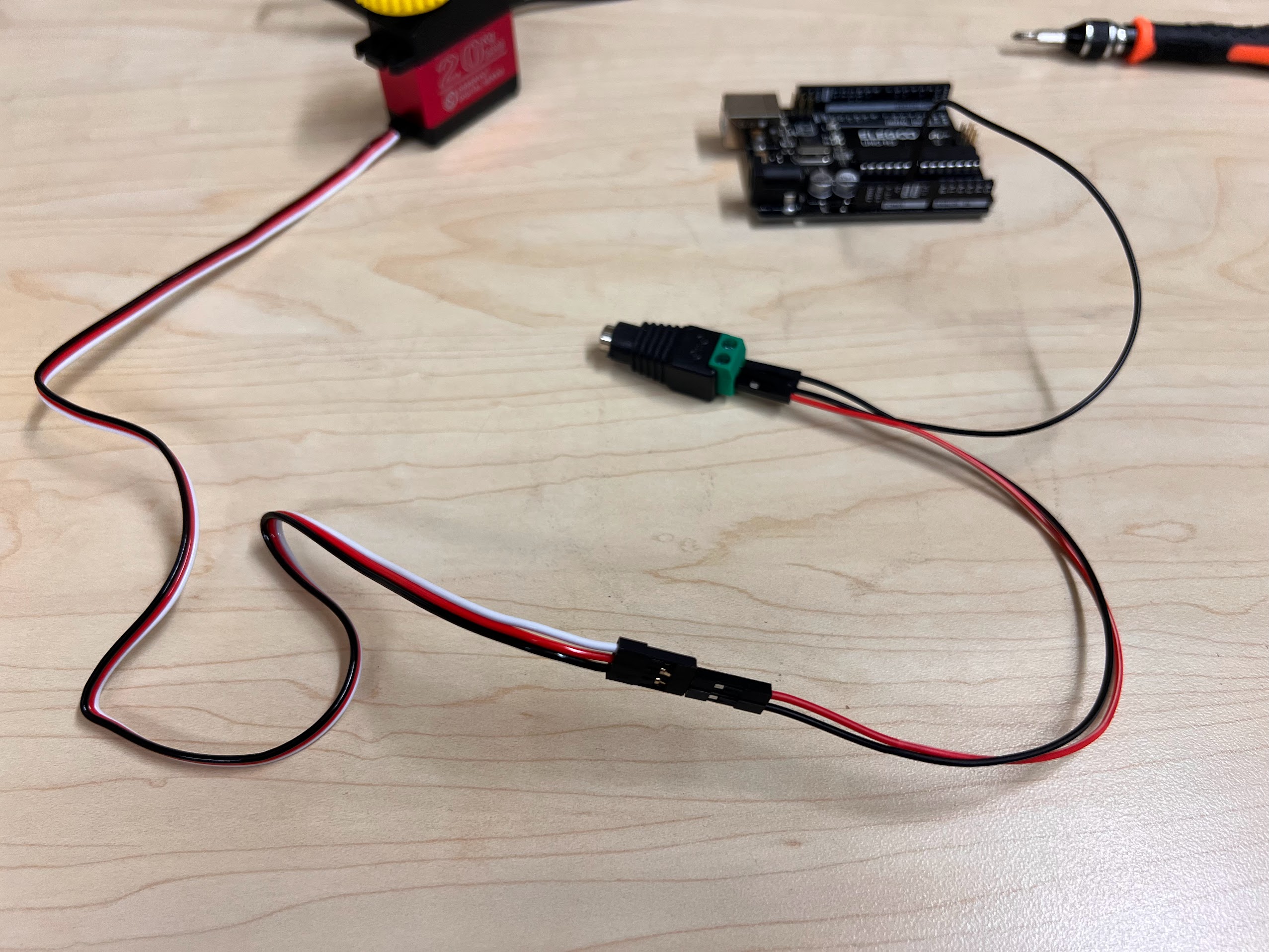
- Attach one end of the White Jumper Wire to the White wire Female Terminal for the Servo, and the other end to Pin 11 on the UNO R3 Board.
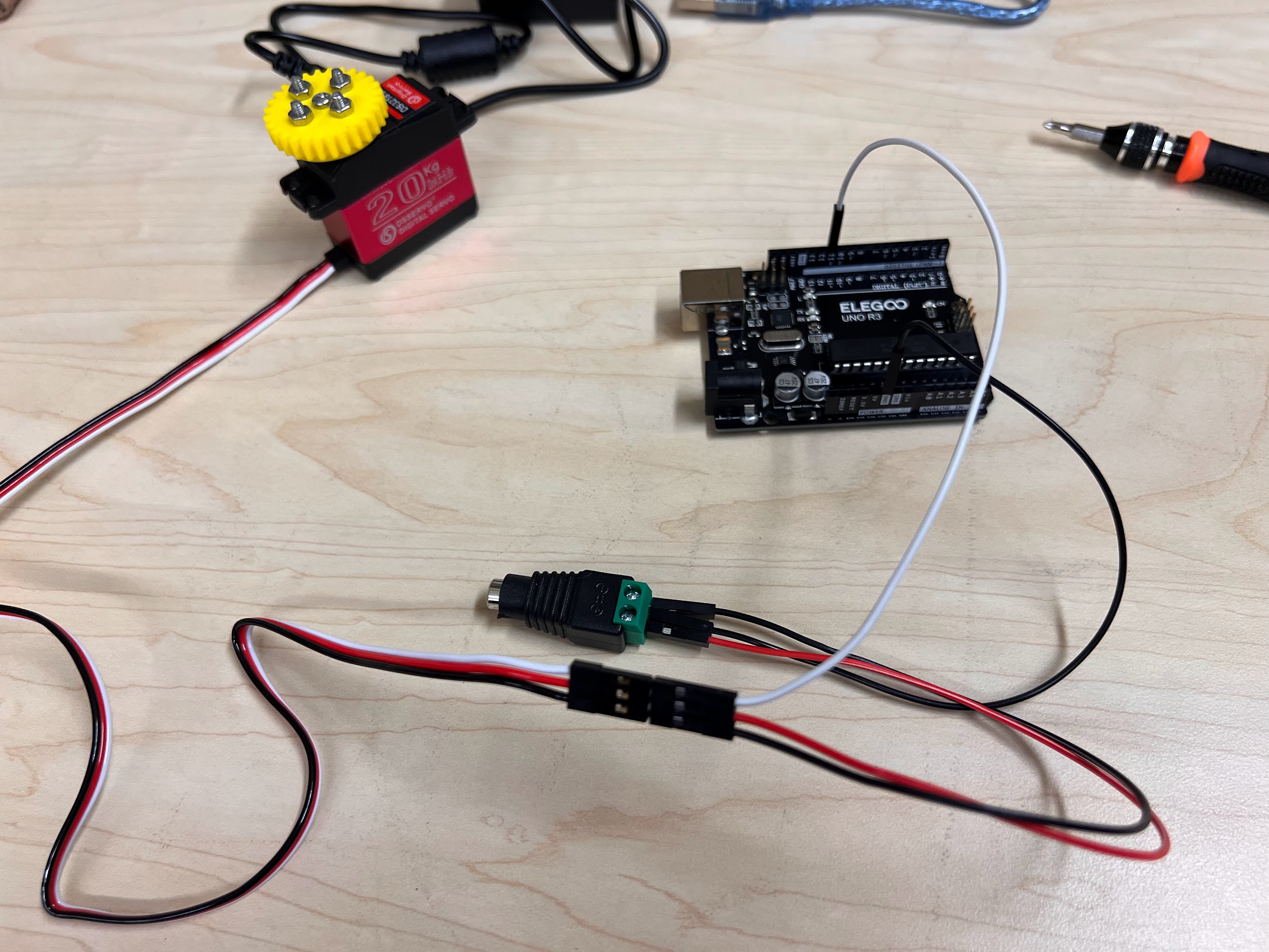
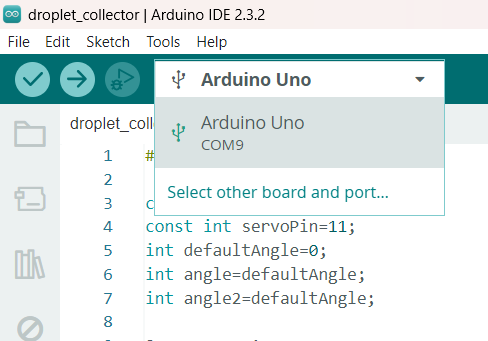
- Now connect the UNO R3 to your computer via USB and the 20W DC Adapter to the DC Barrel Connector.
- Using the Arduno IDE upload the droplet_collector sketch to the UNO R3 Board.
- Execute the cell below to watch a video of the process.